The list below may not be up to date, please check Google Scholar for my latest publications.
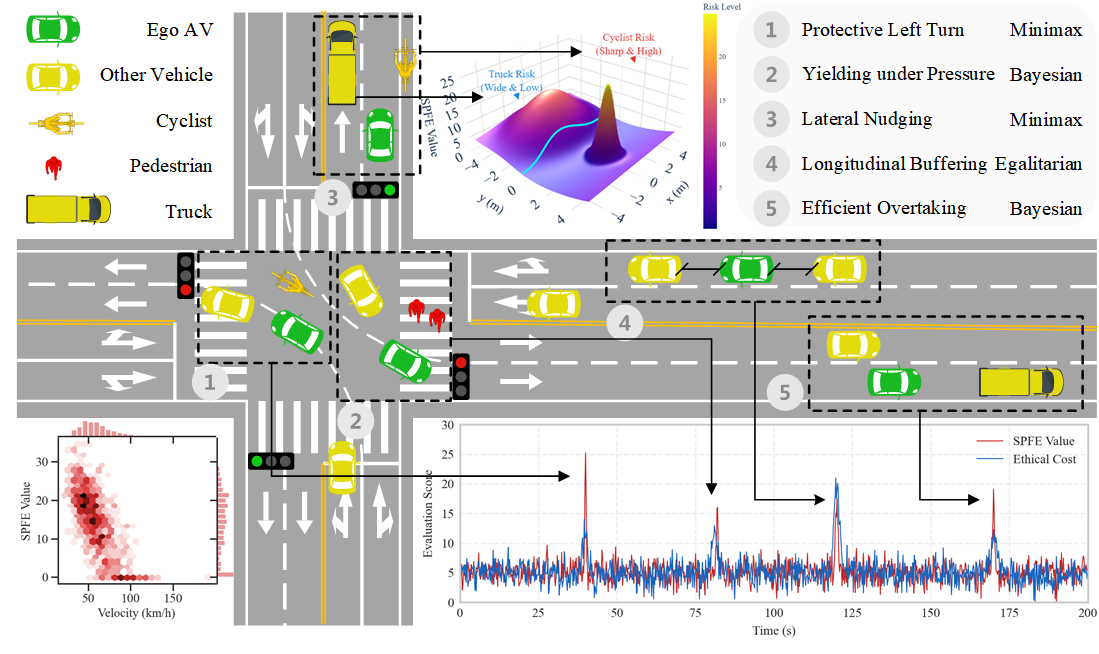
DPEP: Differentiable Predictive Ethics-Aware Planner
Rui Gan, et al.
Under review, 2026
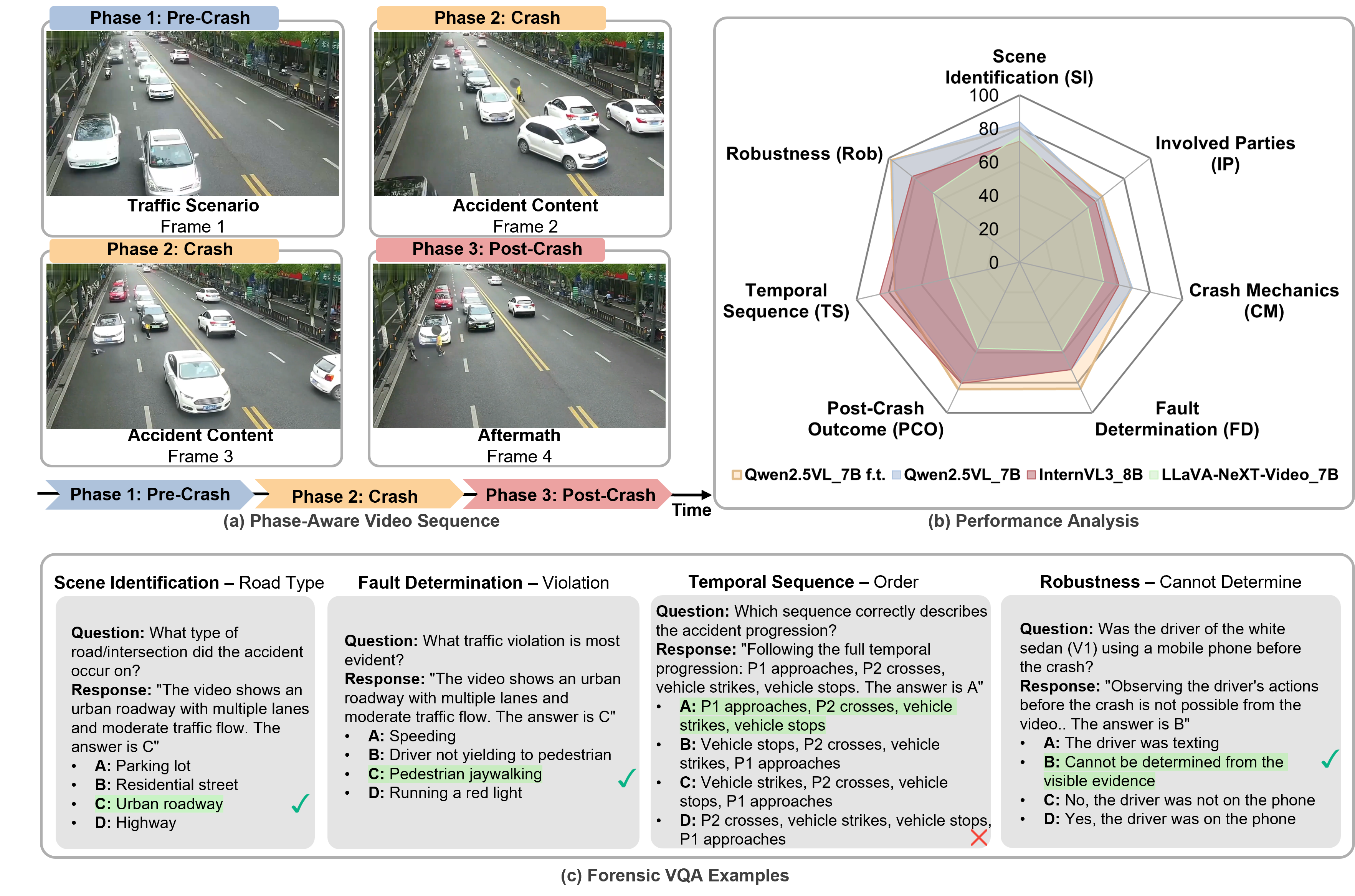
CrashSight: A Phase-Aware, Infrastructure-Centric Video Benchmark for Traffic Crash Scene Understanding and Reasoning
Rui Gan, Junyi Ma, Pei Li, Xingyou Yang, Kai Cheng, Sikai Chen, and Bin Ran
CVPR 2026 Workshop DriveX (Archival Track, Poster), 2026
HERMES: A Holistic End-to-End Risk-Aware Multimodal Embodied System with Vision-Language Models for Long-Tail Autonomous Driving
Weizhe Tang, Junwei You, Jiaxi Liu, Zhaoyi Wang, Rui Gan, Zilin Huang, Feng Wei, and Bin Ran
arXiv preprint arXiv:2602.00993, 2026
V2X-VLM: End-to-End V2X Cooperative Autonomous Driving Through Large Vision-Language Models
Junwei You, Zhuoyu Jiang, Zilin Huang, Haotian Shi, Rui Gan, Keshu Wu, Xi Cheng, Xiaopeng Li, and Bin Ran
Transportation Research Part C: Emerging Technologies, vol. 183, 105457, 2026
SEAL: Vision-Language Model-Based Safe End-to-End Cooperative Autonomous Driving with Adaptive Long-Tail Modeling
Junwei You, Pei Li, Zhuoyu Jiang, Zilin Huang, Rui Gan, Haotian Shi, and Bin Ran
arXiv preprint arXiv:2506.21041, 2025
V2X-LLM: Enhancing V2X Integration and Understanding in Connected Vehicle Corridors
Keshu Wu, Pei Li, Yang Zhou, Rui Gan, Junwei You, Yang Cheng, Jingwen Zhu, Steven T. Parker, Bin Ran, David A. Noyce, and Zhengzhong Tu
arXiv preprint arXiv:2503.02239, 2025
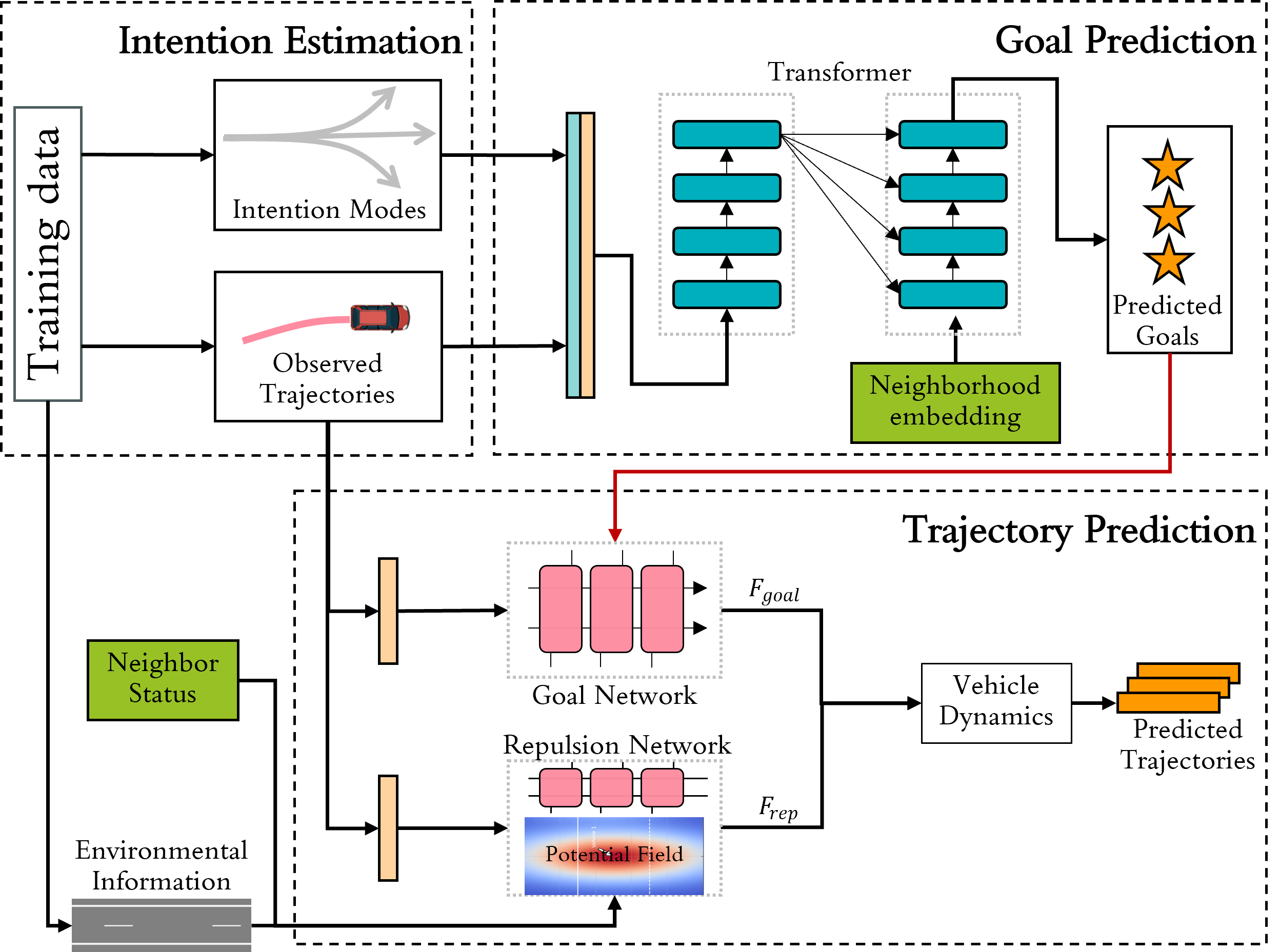
FollowGen: A Scaled Noise Conditional Diffusion Model for Car-Following Trajectory Prediction
Junwei You, Rui Gan, Weizhe Tang, Zilin Huang, Jiaxi Liu, Zhuoyu Jiang, Haotian Shi, Keshu Wu, Keke Long, Sicheng Fu, Sikai Chen, and Bin Ran
Communications in Transportation Research, vol. 5, 100215, 2025
V2X-LLM: Improving Vehicle-to-Everything Integration and Understanding with Large Language Models
Keshu Wu, Rui Gan, Junwei You, Yang Cheng, Pei Li, Jingwen Zhu, and Steven T. Parker
TRB 104th Annual Meeting, 2025
Efficient Large-Scale Traffic Forecasting via Multi-Subgraph Spatio-Temporal Graph Convolutional Networks
Bocheng An, Chuang Cui, Rui Gan, Linheng Li, Xu Qu, and Bin Ran
TRB 104th Annual Meeting, 2025
Real-World Data Inspired Interactive Connected Traffic Scenario Generation
Junwei You, Pei Li, Yang Cheng, Keshu Wu, Rui Gan, Steven T. Parker, and Bin Ran
TRB 104th Annual Meeting, 2025
A Freeway Traffic Flow Prediction Model Based on a Generalized Dynamic Spatio-Temporal Graph Convolutional Network
Rui Gan, Bocheng An, Linheng Li, Xu Qu, and Bin Ran
IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 10, pp. 13682–13693, 2024
Vehicular Speed Prediction Method for Highway Scenarios Based on Spatiotemporal Graph Convolutional Networks and Potential Field Theory
Linheng Li, Bocheng An, Dapeng Zhang, Rui Gan, Zhi Zhou, Xu Qu, and Bin Ran
IEEE Internet of Things Journal, vol. 12, no. 3, pp. 3330–3349, 2024
How Does C-V2X Perform in Urban Environments? Results from Real-world Empirical Experiments on Urban Arterials
Pei Li, Keshu Wu, Yang Cheng, Zilin Huang, Rui Gan, Steven T. Parker, and David A. Noyce
TRB 103rd Annual Meeting, 2024
Generalized Spatio-Temporal Graph Convolution Networks with Dynamic Information for Traffic Speed Prediction
Rui Gan, Bocheng An, Linheng Li, Xu Qu, and Bin Ran
TRB 102nd Annual Meeting, 2023
基于广义时空图卷积网络的交通群体运动态势预测
曲栩, 甘锐, 安博成, 李林恒, 陈志军, 冉斌
交通运输工程学报, vol. 22, no. 3, pp. 79–88, 2022
Modelling Acceleration Lane Length in CAV Lane Merge Area Based on Breakdown Probability
Xingchen Lv, Rui Gan, Lanjie Liu, Haojie Ma, Peipei Mao, and Xu Qu
2nd International Conference on Internet of Things and Smart City (IoTSC), 2022
A DDPG-Based Variable Speed Limit Control for Consecutive Bottleneck
Rui Gan, Xu Qu, Peipei Mao, Linheng Li, and Bin Ran
TRB 101st Annual Meeting, 2022
Connected Reference Marker System for Vulnerable Road User Protection
Bin Ran, Junwei You, Rui Gan, Yang Cheng, et al.
US Patent App. 19/233,422, 2025
Device Allocation System for Distributed Autonomous Vehicle-Cloud Operations
Bin Ran, Sicheng Fu, Rui Gan, Yang Cheng, et al.
US Patent App. 19/172,285, 2025
Proactive Sensing Systems for Automated Driving Systems
Bin Ran, Rui Gan, Sicheng Fu, Yang Cheng, et al.
US Patent App. 19/065,311, 2025
Distributed Computing for Autonomous Vehicles
Bin Ran, Sicheng Fu, Rui Gan, Yang Cheng, et al.
US Patent App. 18/762,995, 2024
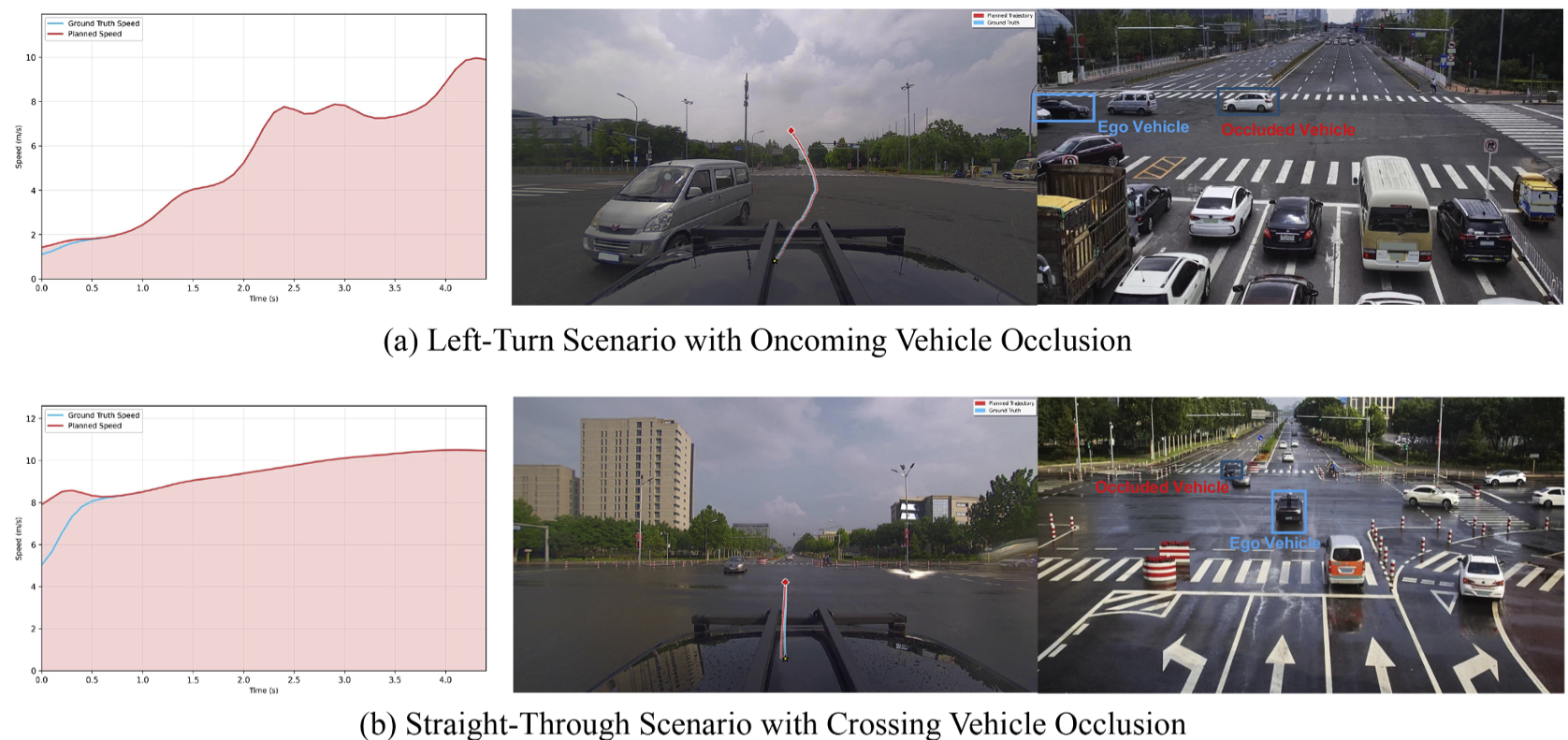
Bridging Physical and Language Models: A Physics-Constrained LLM Framework for Human-Centric Driving Safety
Rui Gan, Pei Li, Bocheng An, Junyi Ma, and Bin Ran
Developing a hybrid framework that constrains LLM reasoning with physics-based vehicle dynamics to ensure safe and human-compatible trajectory planning in complex driving scenarios.
Ethical Decision-Making in Autonomous Vehicles: A Reinforcement Learning Approach for Fair Risk Management
Rui Gan, Linheng Li, Tiantong Nan, Junyi Ma, and Bin Ran
Applying reinforcement learning to learn context-dependent ethical policies that distribute risk fairly among all road users in unavoidable conflict scenarios.